Virtuelles Testfeld für die Verifikation vernetzter und autonomer Fahrfunktionen
Zukunftsvision
Aktuelle Fahrzeuge werden durch neue Funktionen speziell zur Steuerung der Längs- und Querführung zunehmend vernetzter. Dieser Trend findet innerhalb des Fahrzeugs z.B. bei der Sensorfusion, aber auch über die Fahrzeuggrenzen hinaus statt. Um in diesem wachsenden Kommunikationsnetzwerk eine sichere Mobilität gewährleisten zu können, müssen neue Verfahren zur Sicherstellung der Zuverlässigkeit im hohen Varianten-raum von Verkehrssituationen entwickelt werden.
Aktuell findet das Absichern noch sehr stark auf der Straße statt. Das Ziel muss jedoch aus Sicherheits- und Wiederholbarkeitsgründen (auch in Grenzbereichen) eine Virtualisierung sein. Die Vision ist daher ein „Virtuelles Testfeld“.
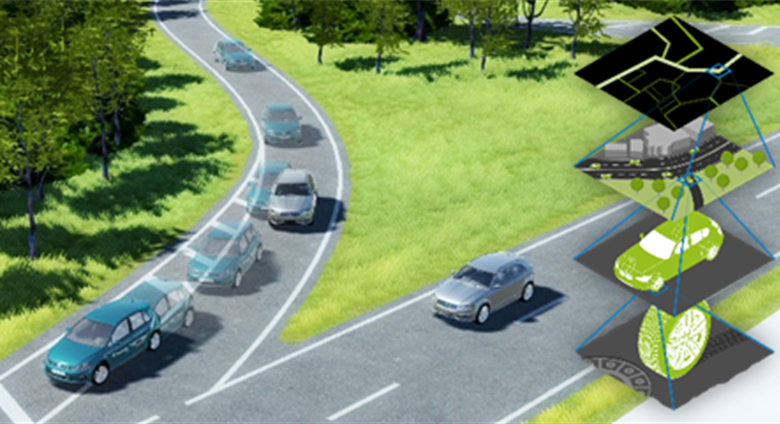 Simulation eines Fahrmanövers im virtuellen Testfeld. Die Simulation erfolgt auf verschiedenen Abstraktionsebenen (Verkehrsfluss, Fahrzeugführung, Fahrphysik, etc.).
Simulation eines Fahrmanövers im virtuellen Testfeld. Die Simulation erfolgt auf verschiedenen Abstraktionsebenen (Verkehrsfluss, Fahrzeugführung, Fahrphysik, etc.).
Motivation und Zielsetzung
Durch den gesteigerten Grad der Vernetzung und Automatisierung werden sowohl funktionale Sicherheit (Safety) als auch Informationssicherheit (Security) zu wesentlichen Fragestellungen in der Fahrzeugentwicklung.
Zusätzlich halten neue Technologien den Einzug ins Automobil. So bieten selbstlernende und adaptive Systeme ein großes Potential zur Realisierung von automatisierten Fahrfunktionen. Jedoch stellen diese Technologien die Hersteller sowie Prüfeinrichtungen bzgl. der Entwicklung und Zulassung vor neue Herausforderungen. Allgemeingültige Tests für automatisierte Fahrfunktionen sind derzeit im realen Umfeld nur eingeschränkt möglich; zu groß ist der Variantenreichtum an Verkehrssituationen und Umweltbedingungen.
Daher ist eine Erstellung von Reifegradaussagen durch Simulation und Berechnungen notwendig. Dafür werden ausgewählte, reale Testfälle in Simulationsumgebungen abgebildet und die Parameterräume an Fahrzeug und Umweltbedingungen durchgespielt, um umfangreiche, abdeckende Analysen durchführen zu können. Darüber hinaus ermöglicht dieses Vorgehen, vergleichbare und reproduzierbare Aussagen gegen zunehmend standardisierte Referenztestfälle.
 Virtuelle Verkehrssituation
Virtuelle Verkehrssituation
Die Absicherung muss für vernetzte Funktionen jedoch nicht nur hinsichtlich Safety, sondern auch für die Security erfolgen. Dafür werden Konzepte zur Absicherung von E/E-Architekturen erarbeitet. Darüber hinaus werden Methoden entwickelt, um E/E Architekturen und deren Kommunikationsschnittstellen simulativ auf definierte Anforderungen (z.B. Zuverlässigkeit, Sicherheit) zu testen. Die Ergebnisse werden anschließend in einen Prozess für die funktionale Absicherung von automatisierten Fahrfunktionen überführt.
Zudem stellt die Robustheit eines Systems gegenüber unvorhersehbaren und nicht modellierbaren Einflüssen eine große Herausforderung dar. So muss das Fahrzeug in der Lage sein, entsprechende „fail-safe“ oder zunehmend auch „fail-operational“ Betriebsphasen umzusetzen.

In Vorstufen des autonomen Fahrens wird die Übergabe der Fahraufgabe vom System an den Fahrer eher die Regel als die Ausnahme darstellen. Auch da stoßen die aktuellen Methoden der Absicherung an ihre Grenzen und werden im Rahmen des virtuellen Testfeldes neu erarbeitet und validiert.
Als Ziel entsteht so ein virtuelles Testfeld für automatisierte Fahrfunktionen, das ein szenarienbasiertes Testen bereits vor den realen Erprobungstests ermöglicht. Die Projektpartner sind auch am „Testfeld Autonomes Fahren Baden-Württemberg (TAF-BW)“ beteiligt und bringen Erfahrungen aus dem Testbetrieb ein, die dann in die Virtualisierung übernommen werden, um somit die Synergien in optimaler Weise zu heben.

Den Projektflyer als PDF zum Download finden Sie hier