iFORESEE - Introductory Concepts for Cooperative and Connected Cars
Motivation
While “autonomous” automated cars are already part of a foreseeable future, the perspective for “connected” or “cooperative” cars is considerably less certain.
One particular hurdle in this context is the market introduction of such driving functions. While “autonomous” functions can be used immediately upon release, “connected” functions require a critical mass of other communication partners to be available. While recent research has shown considerable benefit of connected cars as soon as they make up more than 50 % of traffic, it is expected that such a wide adoption may take around 10 years in Germany alone. It is uncertain, how connected and cooperative features can provide market value while the densities still grow to this level.
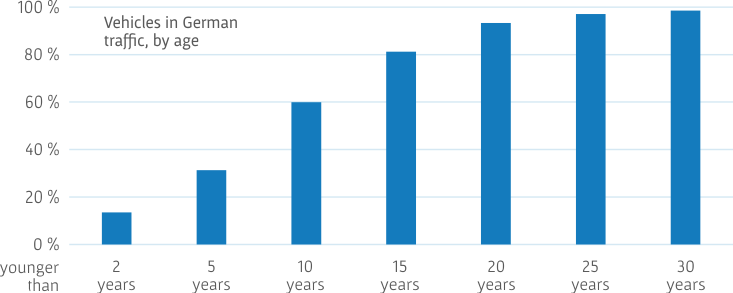 At current adoption speeds in Germany, even optimistic projections imply that new cooperative driving functions must work with less than 20% communication partners in traffic for two years, and five years with less than 40% communication partners. Many new cars will change hands before then. Data: Kraftfahrtbundesamt (German Federal Motor Transport Authority, KBA)
At current adoption speeds in Germany, even optimistic projections imply that new cooperative driving functions must work with less than 20% communication partners in traffic for two years, and five years with less than 40% communication partners. Many new cars will change hands before then. Data: Kraftfahrtbundesamt (German Federal Motor Transport Authority, KBA)
Project Goal
Against this backdrop, the sub-project “iFORESEE” specifies and develops concrete cooperative driving functions which add value already at low densities of connected cars in traffic, and which can be realized with close-to-market technology. The project both addresses the technical possibilities (maneuver planning, communications, human-machine interaction) as well as effects on user acceptance, traffic flows, society and market.
This broad approach aims at demonstrate that the technology of cooperative and connected driving can operate well at low densities of connected vehicles and at low levels of automation (SAE 1 to 3), so that it can add immediate value at the market, thereby allowing an evolutionary growth of connected functions.
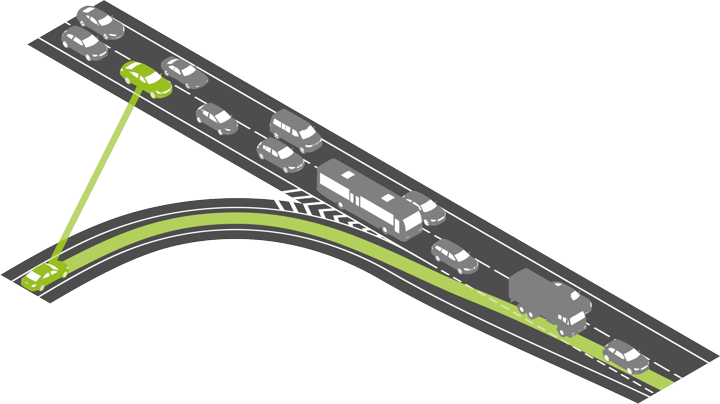 Cooperative merging onto a highway: Even at low densities of connected vehicles, and low levels of automation, vehicles can merge more safely and efficiently. A particular challenge for this is a precise synchronization of the participating vehicles on their way to the highway access.
Cooperative merging onto a highway: Even at low densities of connected vehicles, and low levels of automation, vehicles can merge more safely and efficiently. A particular challenge for this is a precise synchronization of the participating vehicles on their way to the highway access.
Paradigms
A set of paradigms has been laid out for the driving functions developed and analyzed in this project, to assure sustainability of the solutions.
Short-Term Value
The driving functions must operate well with low densities of connected vehicles (around 10 %) under realistic conditions. The technology costs must be justified in operation at this stage.
Mid-Term and Long-Term Value
The driving functions must be upward-compatible to co-exist symbiotically with higher levels of automation and more advanced degrees of cooperative functions. Since most cars are operated for many years, they must be able to operate with more advanced vehicles, and provide a useful basis for later generations of connected cars.
Broad Value
Any driving function has many facets that affect each other: Safety, comfort, efficiency and acceptance. A pure gain in safety can adversely affect traffic flows of acceptance, an improved effectiveness can increase acquisition costs or operational costs, or privacy risks. In addition to that, sustainable practical solutions require standards across manufacturers.
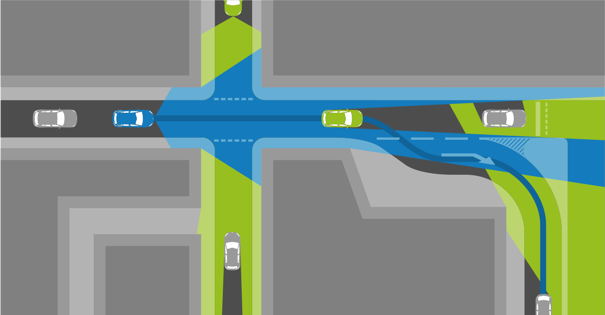 Joint use of sensor information in cooperative perception
Joint use of sensor information in cooperative perception
Partners
For this reason, the project joins a widespread selection of research institutions in and around Karlsruhe, which focus on automated driving functions (FZI, KIT-MRT and Fraunhofer IOSB), communication technology (KIT-IHE), traffic research (KIT-IfV), as well as acceptance and market studies (KIT-IFAB and Fraunhofer ISI), and relies on a close cooperation with automotive manufacturers and suppliers.
The project flyer is available for download here