






Virtual Test Field for the Verification of Connected and Autonomous Driving Functions
vision
Automobiles are becoming increasingly connected due to new functionalities concerning the longitudinal and lateral guidance. This process is routed within the vehicle, e.g. during sensor fusion, as well as beyond vehicle limits. In order to guarantee safe mobility in this expanding communication network, new procedures must be developed to ensure reliability in wide variations of traffic simulations.
At present, these new procedures are tested on the road. However, for reasons of safety and repeatability (even in threshold areas), the goal must be a virtualization. The vision is therefore to simulate in a “virtual test field”.
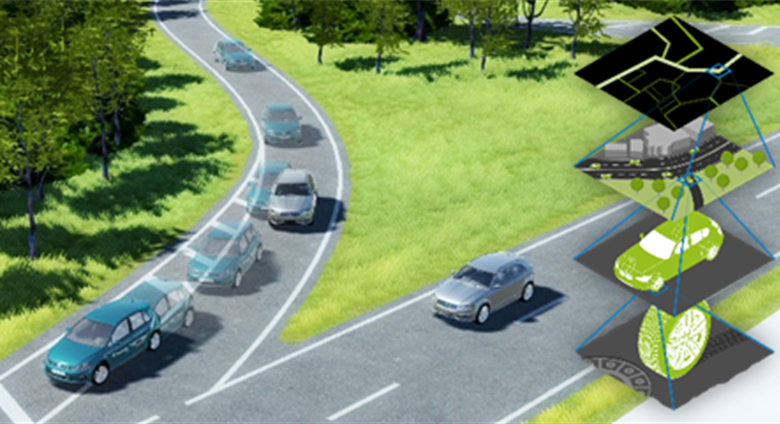 Simulation of a driving maneuver in a virtual test field. The simulation takes place on different abstraction levels (traffic flow, vehicle guidance, driving physics, etc.).
Simulation of a driving maneuver in a virtual test field. The simulation takes place on different abstraction levels (traffic flow, vehicle guidance, driving physics, etc.).
Motivation and Objective
Due to the increased degree of connectivity and automation, both functional safety and information security are essential issues in vehicle development. In addition, new technologies, such as self-learning and adaptive systems, offer great potential for realizing automated driving functions. However, these technologies confront manufacturers and testing facilities with additional challenges in terms of development and certification. Generally valid tests for automated driving functions are currently only possible to a limited extent in real environments, due to the great variations in traffic situations and environmental conditions.
Therefore, it is necessary to create maturity statements through simulation and computations. For this purpose, selected real test cases are mapped into simulation scenarios, and the parameter spaces of the vehicle and environmental conditions are simulated in order to be able to carry out comprehensive analyses. In addition, this procedure allows comparable and reproducible statements against increasingly standardized reference test cases.
 Virtual traffic situation
Virtual traffic situation
The validation of connected functions must ensure both safety and security. For this purpose, concepts for the protection of E/E architectures are developed. In addition, methods are developed to test E/E architectures and their communication interfaces in a simulated manner for defined requirements (e.g. reliability, security etc.). The results will be transformed into a process of functional validation targeting automated driving function.
Furthermore, the robustness of a system against unpredictable and non-modellable influences presents a considerable challenge. Thus, the vehicle must be able to implement appropriate “tail-safe” or “fail-operational” systems.

In the initial stages of autonomous driving, the handover of the driving function from the system to the driver will likely be the norm rather than the exception. Current methods of validation will therefore reach their limits. Therefore, new methods of handover will be elaborated and validated within the virtual test field as well.
The aim is to create a virtual test field for automated driving functions which enables scenario-based testing, before real world test runs. The project partners are also involved in the “Test Area Autonomous Driving Baden-Württemberg (TAF-BW)” and offer their experience, which will then be transferred to simulation in order to optimally leverage the synergies.

The project flyer is available for download here